仿人机器人发展史
人们印象中的机器“人”总是会想着这个机器像“人”,或是“人”。就像我们看过很多的科幻电影,里面的机器人能哭、能笑,拥有和人类一样丰富的感情。

目前,仿人机器人的研究主要向往2个方向发展:一是让机器人更像人形,具有更强的智能;二是让机器人可以做更多人类难以完成的细致微小的工作。
关于仿人机器人
它是一种外观与人相似,具有移动功能、感知功能、操作功能、学习能力、自治能力、联想记忆、情感交流的智能机器人。
不仅拥有人类的外观,而且还能适应人类的生活和工作,具有灵活的行走机构,可以随时走到需要去的地方,并完成指定的或预先设定的工作,并且可以在多方面扩展人的能力。

仿人机器人是一个国家高技术实力和发展水平的重要标志,集机械、材料、电子、计算机、自动化等多门学科于一体,技术含量高,所以研究和开发的难度也比较大。
它的发展影响着整个社会、经济的变革,影响着工业、农业、服务业等行业的发展,这也是不惜投入巨资进行研究与开发的原因。目前,科学家们在仿人机器人上做了大量的工作,并取得了突破性的进展。
仿人机器人发展历史
(国外)
仿人机器人的研究开始于20世纪60年代末,现在已经成为机器人技术领域里的主要研究方向之一。
1968年,美国通用电气公司的研究人员试制做了一台名叫Rig的操纵型二足步行机构,从而揭开了仿人机器人研究的序幕。
1973年,日本人的加藤一郎从工程角度研制除世界上第一台真正意义上的仿人机器人——WABOT-1。(可以与人交流、行走和根据命令抓取物体)

1984年,加藤实验室又研制出了采用踝关节力矩控制的仿人机器人——WL-10RD(实现了每步1.5s的平稳动态步行)
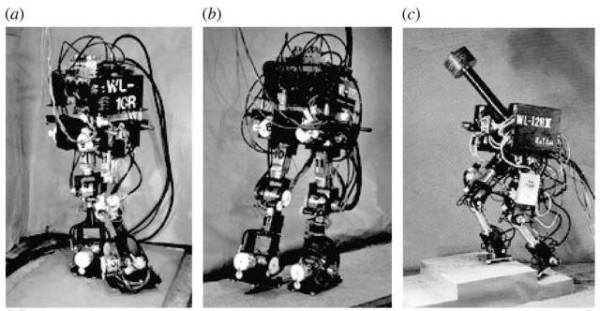
1986年加藤实验室再次研制成功了WL-12(R)型步行机器人。(通过躯体运动补偿下肢的任意运动,实现了步行周期1.3s)
索尼公司于2000年11月也推出了娱乐型仿人机器人——SDR-3X(可以根据音乐节拍跳舞,并进行高速度的自律运动。配备有声音和图像识别功能)

索尼于2003年11月又推出了世界首台会跑的仿人机器人——QRIO(实现了搭载控制系统的电源系统的跑动)

1990年美国俄亥俄州大学提出用神经网络来实现双足步行机器人的动态步行,并在SD-1型二足步行机器人中得以实现。
2005年4月20日,二足步行机器人Rabbit向世人展示了它的奔跑能力。
(国内)
相对于国外而言,我国从20世纪80年代中期才开始研究双足步行机器人。
国防科技大学在1988~1995年间,先后研制成功平面型六自由度双足机器人KDW-I 、空间运动型机器人KDW-II 和KDW-III 。
2000年11月29日,国防科技大学又研制出我国第一台人类双足步行机器人“先行者”
哈尔滨工业大学于1985~2000年研制出二足步行机器人HIT-I 、HIT-II 和HIT-III 。
上海交通大学于1999年研制仿人机器人SFHR(腿部和手臂分别有12个自由度和10个自由度,身上有2个自由度,一共24个自由度)
北京理工大学于2002年12月研制出仿人机器人BRH-1。此后,又在此基础上研制成了“汇童”机器人
清华大学于2002年研制出具有自主知识产权的仿人机器人THBIP-I 。(32个自由度)

仿人机器人已经取得了很大的成就,虽然目前来说,仿人机器人距离成为“人”的距离还是比较远的,但是仿人机器人的研究具有巨大的潜力。
举报/反馈
网址:仿人机器人发展史 https://m.mxgxt.com/news/view/2012471
相关内容
建议联合华为发展仿真机器人明星仿真机器人可能让人气颜值明星获得巨大版权收入,比如大连仿生人形机器人明星“出圈”记
【上证机器人】看好仿生机器人在新文旅消费应用场景落地——人形机器人行业观点更新
明星仿真机器人的陨石...
江特电机:人形机器人产业是江特电机的历史性发展机遇,积极与行业上下游合作
震惊!国际巨星竟是仿生机器人
人形机器人行业观点更新:看好仿生机器人在新文旅消费应用场景落地
揭秘Doris:人形机器人模仿狗叫的秘密与挑战
大象机器人:AI仿生机器宠物将在CES 2025上首次公开亮相
智能机器人时代:从日常应用到仿生革命
随便看看
最新实时动态
- 影视反派竟是哲学家,当年台词越听越有理
- 迪丽热巴:星爷亲手选出来的全盛时期的周星驰!
- 荷兰弟称给哈兰德发私信没收到回复
- “未来我们还要走很多很远的路 我们走着瞧!”
- 萧猫钓鱼名场面来了,简直就是对抗路夫妇赢下比赛的MVP结算画面!
- 顾锦朝喜欢叶限吗?
- 1v30?展昭的答案是:来多少,倒多少
- 从今往后,玲珑山庄的所有重量,都压在玲珑肩上了
- 张凌赫称无义务对LP以外人亲近,回应亲密界限
- 孙怡 惊喜现身范玮琪 长沙演唱会 -现场又双叒叕教范范说东北话
热点实时动态
- 118546
- 25440
- 20036
- 19719
- 19484
- 19440
- 19175
- 18744
- 18702
- 18694

