一种基于波浪式并行网络的北斗卫星星历预测方法及系统
本发明涉及轨迹预测领域,尤其涉及一种基于波浪式并行网络的北斗卫星星历预测方法及系统。
背景技术:
1、地面接收机在是用户获取北斗卫星定位服务的关键设备,其获取卫星位置并进行定位的过程如下:接收机在几秒内快速接收到卫星伪距,再花费至少18秒接收北斗卫星的广播星历,并用广播星历修正内嵌的动力学模型进行轨道预测,以获取当前卫星的位置等星历信息,接收到至少四颗卫星的信号后,根据定位原理进行用户的位置解算。然而,接收机动力学模型的预测误差随时间不断增大,导致定位误差不断扩大,接收机被迫花费时间更新星历数据,这对接收机的高精度定位和快速定位构成了挑战。因此,提升用户端(即接收机内部)的长期卫星星历预测精度至关重要。目前,大部分的研究方向是针对动力学模型的改进,这种方法在现有动力学模型(如开普勒模型、sdp4)的基础上,考虑不同的摄动力修正项,并提高轨道外推时的积分阶数,从而提升轨道预测的精度,以避免频繁接收广播星历。然而,这些方法前期需要复杂的受力分析与大量不同类型的传感器的观测数据来确定修正项及其系数,并且该过程计算量巨大、耗时长、成本高。
技术实现思路
1、有鉴于此,为了解决现有星历预测方法针对于动力学模型进行改进,其改进项参数确定过程十分复杂且需要大量的星历观测数据,进而导致计算量过大的技术问题,本发明提出一种基于波浪式并行网络的北斗卫星星历预测方法,所述方法包括以下步骤:
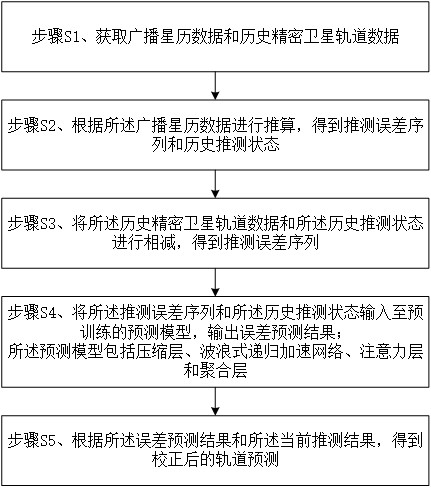
2、获取广播星历数据和历史精密卫星轨道数据;
3、根据所述广播星历数据进行推算,得到当前推测结果和历史推测状态;
4、将所述历史精密卫星轨道数据和所述历史推测状态进行相减,得到推测误差序列;
5、将所述推测误差序列和所述历史推测状态输入至预训练的预测模型,输出误差预测结果;
6、所述预测模型包括压缩层(patch)、波浪式递归加速网络(water-wave recurrentacceleration network,wran)、注意力层(attention,attn)和聚合层(aggregation,agg);
7、根据所述误差预测结果和所述当前推测结果,得到校正后的轨道预测。
8、本实施例引入波浪式递归加速网络,提出的模型本身具备递推的时序特点,相比于使用位置编码的transformer模型,更有利于发掘误差的演变规律,具备更加精确的预测结果。
9、所述广播星历数据表示如下:
10、
11、其中,表示所有广播星历数据;表示初始时刻的广播星历数据;表示时刻的广播星历数据;表示时刻的广播星历数据;任意一个广播星历数均包括星历参考时间、轨道长半轴的平方根、轨道偏心率、轨道倾角、升经交点、轨道近地点角距、平近点角、平均角速度改正值、升交点赤经变化率、轨道倾角变化率、升交点角距余弦调合改正项振幅、升交点角距正弦调合改正项振幅、卫星地心距余弦调合改正项振幅、卫星地心距正弦调合改正项振幅、轨道倾角余弦调合改正项振幅、轨道倾角正弦调合改正项振幅。
12、在一些实施例中,所述根据所述广播星历数据进行推算,得到当前推测结果和历史推测状态这一步骤,其具体包括:
13、所述广播星历数据包括当前广播星历数据和历史广播星历数据;
14、根据所述当前广播星历数据,利用动力学模型进行推算,生成当前推测结果;
15、根据所述历史广播星历数据,利用动力学模型进行推算,生成历史推测状态。
16、通过该优选步骤,利用动力学模型的推测数据和实际的精密轨道数据计算动力模型的推测误差。
17、在一些实施例中,所述预测模型设有编码器通道和解码器通道。
18、在一些实施例中,所述将所述推测误差序列和所述历史推测状态输入至预训练的预测模型,输出误差预测结果这一步骤,其具体包括:
19、将所述推测误差序列和所述历史推测状态进行拼接,得到拼接数据;
20、基于压缩层,将所述拼接数据和所述推测误差序列分别进行压缩,得到压缩后的拼接数据和压缩后的推测误差序列;
21、将所述压缩后的拼接数据输入至所述编码器通道,生成编码器输出;
22、将所述压缩后的推测误差序列输入至所述解码器通道,生成解码器输出;
23、基于第一注意力层,将所述编码器输出和所述解码器输出进行特征融合,得到最终特征;
24、根据所述最终特征输出误差预测结果。
25、通过该优选步骤,利用深度学习模型学习历史的动力学模型推测误差规律。
26、在一些实施例中,所述编码器通道依次包括第一波浪式递归加速网络、聚合层和第二波浪式递归加速网络,所述将所述压缩后的拼接数据输入至所述编码器通道,生成编码器输出这一步骤,其具体包括:
27、将所述压缩后的拼接数据输入至所述编码器通道;
28、所述第一波浪式递归加速网络进行特征提取,得到第一层时序特征和第一历元时序特征;
29、所述聚合层对所述第一层时序特征进行特征增强,得到聚合后的时序特征;
30、所述第二波浪式递归加速网络对所述聚合后的时序特征进行再提取,得到编码器输出。
31、在一些实施例中,所述解码器通道包括第三波浪式递归加速网络和第二注意力层,所述将所述压缩后的推测误差序列输入至所述解码器通道,生成解码器输出这一步骤,其具体包括:
32、将所述压缩后的推测误差序列输入至所述解码器通道;
33、所述第三波浪式递归加速网络进行特征提取,得到第三历元时序特征;
34、所述第二注意力层将所述第一历元时序特征与所述第三历元时序特征进行融合,得到解码器输出。
35、在一些实施例中,所述波浪式递归加速网络为网状结构,所述波浪式递归加速网络中的节点为水平垂直门控选择单元(horizontal vertical gated selective unit,hvgsu)。
36、其中,第一波浪式递归加速网络、第二波浪式递归加速网络和第三波浪式递归加速网络的结构和原理基本相同。
37、本发明还提出了一种基于波浪式并行网络的北斗卫星星历预测系统,所述系统包括:
38、数据接收模块,用于获取广播星历数据和历史精密卫星轨道数据;
39、动力学推算模块,用于根据所述广播星历数据进行推算,得到当前推测结果和历史推测状态;将所述历史精密卫星轨道数据和所述历史推测状态进行相减,得到推测误差序列;
40、误差预测模块,用于将所述推测误差序列和所述历史推测状态输入至预训练的预测模型,输出误差预测结果;所述预测模型包括压缩层、波浪式递归加速网络、注意力层和聚合层;
41、校正模块,用于根据所述误差预测结果和所述当前推测结果,得到校正后的轨道预测。
42、基于上述方案,本发明提供了一种基于波浪式并行网络的北斗卫星星历预测方法及系统,本发明提出的预测模型考虑了单个参考历元内部的推测误差、推测状态的时序关系以及不同参考历元之间推测误差、推测状态的时序关系,通过采用hvgsu同时提取两个维度的时序特征。同时,针对在不同参考历元对同一时刻的卫星进行外推下获得的推测误差与推测状态,通过wran同时学习这些不同参考历元的推测误差表示;针对冗余的时序特征表示,利用卷积在聚合层进行相邻hvgsu节点的特征合并,并通过多头注意力机制将提取的时序表示实现信息交互融合用于卫星轨道误差预测,以校正后续卫星轨道外推,最终实现了北斗星历高精度、快速计算效率的星历预测。
网址:一种基于波浪式并行网络的北斗卫星星历预测方法及系统 https://m.mxgxt.com/news/view/1289409
相关内容
基于星间测距的分布式自主星历更新算法基于滑动式算法的精密星历拟合方法比较研究
卫星干扰源定位系统中星历校正技术
小波神经网络在股价预测中的应用
一种基于星对统计特征的星图匹配方法
基于复杂网络和可视图结构的股指极端值预测方法研究
一种基于追星族公会的大数据智能推荐系统及方法与流程
基于大数据的NBA球员数据分析及预测系统
基于社交网络数据的电影票房预测研究
一种空间碎片环境平均演化预测及星座影响分析方法
随便看看
最新实时动态
- 作曲家陈钢去世:24岁写《梁祝》,一生为中国音乐“说情”
- 俄罗斯又乱世抽中保底英雄了
- Anok Yai 剃光头了!有网友认为,她被要求迎合刻板印象!
- 《哥斯拉大战金刚》19岁美国女星车祸身亡
- 知否主仆情深,叫一声姑娘永远都是我的姑娘
- 结伴壮游文墨共生 莫言王振带来十八罗汉诗画作品特展
- 齐出,一门一传奇
- 00后也在单曲循环王杰?
- 刘宇宁龚俊粉丝反应过渡,事情走向变化
- 汪明荃追忆谢贤
热点实时动态
- 135579
- 25490
- 20084
- 19770
- 19515
- 19476
- 19208
- 18779
- 18755
- 18732